Robot si vystačí aj s jednou nohou: Skáče stále a rád
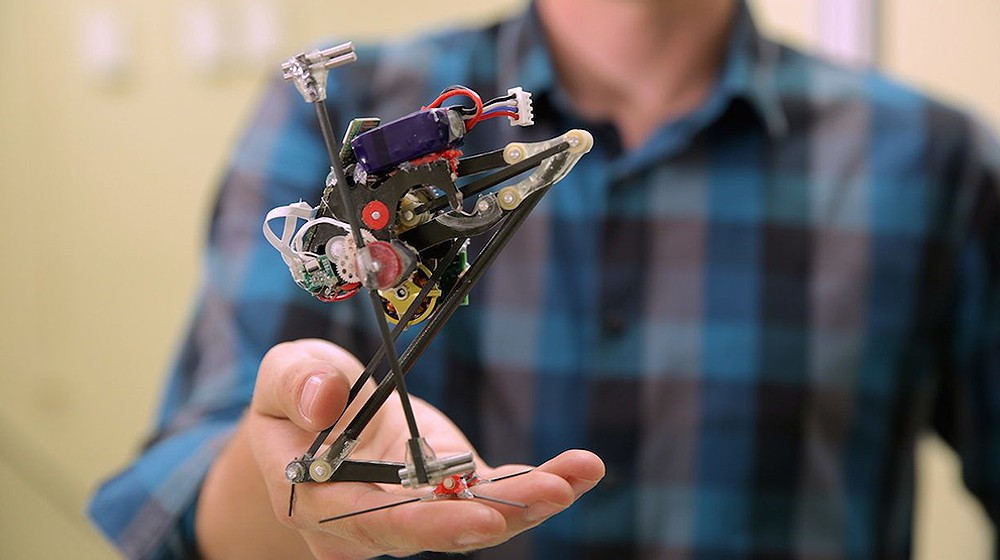
Vedci z Kalifornskej univerzity v Berkeley predstavili novú generáciu jednonohého robota s označením Salto-1P, ktorý je prispôsobený len na skákanie. Zatiaľ čo predošlá generácia skákala náhodne a nedalo sa ju poriadne ovládať, s novým ovládačom a pokročilejšími výpočtami už je možné pomerne presne nastaviť miesta, kam sa má robot dostať.
Efektívne skoky
Konštrukcia robota Salto-1P je postavená na obrátenom kyvadlovom princípe s využitím pružín a dvoch vrtulí. Vďaka tomu síce ušetrí veľa energie na samotný výskok, ale o to zložitejšie je uriadiť smer, v ktorom má robot pri ďalšom skoku pokračovať.
Samotný ovládač síce ovplyvňuje silu skoku, ale len v rámci veľmi krátkej doby, kedy sa noha nachádza na povrchu. A k tomu všetkému sa musí neustále všetko vyvažovať tak, aby sa neprevrátil a nespadol. Na to slúži miniatúrne vrtule, ktoré sa spúšťajú len na krátku chvíľu, s presnou rýchlosťou a podľa potreby.
 Zdroj:
Twitter
Zdroj:
Twitter
Náročnejší terén
Zatiaľ čo u predošlej generácie boli vedci radi, že im robot aspoň trochu skákal, v tejto fáze sa zamerali na oveľa presnejšie ovládanie a schopnosť nasmerovať robota na dané miesto.
S novým ovládačom a pokročilejšími výpočtami, ktoré sú robené mimo konštrukcie robota, rovnako ako externé snímanie obrazu, sa im nakoniec podarilo zlepšiť presnosť trikrát a znížiť chybu doskoku na maximálne 10 centimetrov. Slušných 95 percent doskokov robota sa potom drží v oblasti 30 centimetrov.
Výhodou je, že to platí aj pre náročnejšie povrchy, ktoré napríklad nie sú úplne rovné, sú vo výške alebo sa pohybujú. Ako ale tvorcovia uvádzajú, presnosť dopadu sa mení podľa sily odskoku, ktorú je nutné použiť. Čím ďalej alebo vyššie musí robot skočiť, tým väčšiu nepresnosť a rozptyl miesta dopadu vzniká. Pomocou menších skokov sa dajú ale presnosti veľmi rýchlo dosiahnuť.
Je to možné vidieť na videu, kedy sa má robot dostať zo zeme cez stoličku na stôl. Potrebuje na to nie dva skoky, ale celkovo osem skokov, pretože si v jednotlivých častiach upresňuje pozíciu a hybnosť pre ďalší skok.
Čoskoro vyrazí aj von
V súčasnosti je robot prispôsobený len na interné použitie, pretože vyžaduje pevne umiestnené kamery, ktoré sledujú pozície a podľa toho upravujú výpočty. Vedci ale chcú systém upraviť tak, aby mohol fungovať aj vonku. Výpočty a snímanie prostredia by sa tak robilo priamo v tele robota, čo by v spojení s jednoduchým špecializovaným čipom a optimalizovanými výpočtami nemal byť problém.
S tým ale súvisí aj spotreba. Teraz totiž robot vydrží na batérií skákať len pár minút a dôvodom je, že sa tvorcovia ešte vôbec nezaoberali zlepšením efektivity využitia energie na rôzne druhy skokov. Robot tak spotrebuje stále približne rovnako energie - či už skáče ďaleko (vysoko), alebo len málo na krátke vzdialenosti a do malej výšky. V tomto smere je tak ešte veľa priestoru na optimalizáciu.
Humanoidný robot Atlas od Boston Dynamics už zvláda parkour: Len tak pred ním neutečiete
Spoločnosť Boston Dynamics patriaca pod SoftBank, sa zaoberá vývojom pokročilých robotov a má aj vlastného humanoidného robota - Atlas, ktorý konštrukciou vychádza z ľudského tela. Má nohy, ruky, "hlavu" a pohybuje sa vzpriamene ako človek. V minulosti sme okrem klasického behu mohli vidieť aj pokrok v podobe skákanie salta.